Full Frame Guiding and Focusing*
A revolution on auto-guiding and focusing
Our full frame guiding and focusing patent pending technology does not require, nor need, any specific star for guiding and focusing* in real time. Instead any astronomical structures available in the whole (full) guider frame is used. Our new SkySurveyor Suite (SKSS), including SkyGuide and SkyGuard (SKG) for supporting full frame guiding and focusing. SKSS is ASCOM compliant too Want to know more? Click here to access the SkyGuide/SkyGuard SKG documentation (HTML).
– Using the whole (full) frame of your guider
Traditionally auto-guiding software has been based on centroid calculations of one guide star (OAG, self-guided cameras), or in some applications (such as guide-scopes) few guide stars, using guiding cameras with relatively small chip diagonals. Alternatively, the on-axis guider (ONAG) technology features a large, on axis, field of view (FOV) at once for the guiding camera, up to 28mm in diagonal (APS-C chips), without requiring any rotation or any motion of any part of the optical train. This large FOV offers the unique opportunity to leverage today’s low cost, high QE, low noise, large chip, monochrome cameras for auto-guiding and continuous auto-focusing* as well. Innovations Foresight has developed an innovative, patent pending, technology processing the whole guider frame (aka full frame). There is no need for any automatic, nor manual, selection of any guide star anymore. Instead advanced digital image and statistical processing retrieve guiding and real time focus* information from astronomical structures seen by the guider when using an ONAG. Although this technology works with guiders having smaller chip diagonals, large ones, when used with an ONAG, lead to very large FOV at once for guiding. Processing the full frame of the guider improves SNR and minimizes seeing induced auto-guiding errors (due to a small isoplanatic/isokinetic patch) by using, at once, all the useful information across the whole guider frame. Advanced statistical optimal techniques are used to extract the relevant information from the guider image noise floor and artifacts, such as hot pixel, gradient, … Since there is no centroid calculation, there is no assumption made concerning the shape of the guide star(s) neither. As a matter of fact there is no need to manually nor automatically find and select any guide star(s) for auto-guiding anymore. This is essentially the end of the traditional guide star centroid approach the way we know it, replaced by full frame information processing using all the pixels of the guider frame, or sub-frame if the user wants to focus on some aspect of the frame (like a comet or an asteroid). Each, and every, pixel contribution from the guider frame being weighted automatically for auto-guiding and auto-focus* purpose in relation to its likelihood of carrying pertinent information for those tasks using advanced multi-variate statistics. Such techniques allows auto-guiding under very low SNR (near zero dB) where the signal is in the range of the noise floor. Conditions at which most centroid based auto-guiding software would have lost the guide star, even at higher SNR. This full frame approach when used with an ONAG, like our patented SharpLock technology used in FocusLock, monitors in real time (while the imager’s shutter is opened) your scope focus and controls any ASCOM compliant focuser for keeping your images sharp. The full frame guiding and focusing* technology is implemented in the SkySurveyor Suite (SKSS), including SkyGuide and SkyGuard. SKSS also features optimal guiding which displays the predicted image FWHM value for a given setup, mount performance and local seeing. Click here for accessing the NEAIC 2018 optimal guiding slide show (PDF). * Full frame real time focusing requires an ONAG, while full frame guiding does work with any set-ups, guide scope, OAG, self-guided camera/FW, or ONAG. However when used with an ONAG the guider FOV at once is up to 28mm supporting the use of large diagonal (like APS-C classes) guider.
SkyGuard Screenshot: Guiding/Focusing with ONAG+ASI1600MM (Ø 22mm)

SKS (SkyGuide, SkyGuard) is now available for download for a free 60 day trail period. After the trial period SKG can by bought from our online store here.
SKS may be updated and upgraded based on user feedback, therefore you are strongly encouraged to send any comment at:
customerservice@innovationsforesight.com
Click on the link below to watch a SkyGuide introduction video:
SkyGuide introduction YouTube video
Here is yet another link to a TAIC YouTube video on SkyGuard:
SkyGuard Astro-Imaging Channel (TAIC) YouTube video
For downloading your SKS installer package (ZIP) please use the link below:
SkyGuide/SkyGuard (SKS) 32 and 64 bit for Windows OS Installation Package Download
– How does it work?
The full frame guiding technology uses advanced digital image correlation (DIC) for retrieving the image registration between a reference guider image, taken once at the beginning a new session, and the current guider frame. By nature of the processing any pattern in the guider image can be used for the task, not only stars. All you need is some pattern, with a large guider FOV provided by an ONAG there is a high probability for some astronomical structure to be presented in the guider FOV, especially since you can guide on axis on your target. if there is only noise no algorithm could guide anyway. The algorithm does not make any assumption about the existence of any star, nor its/their shape(s), but instead modelizes the guider noise for extracting information from the noise floor. This step is achieved by using an advanced multi-variate noise model and processing, making the system very robust against noise, artifacts, hot pixels, image gradient, … Below an example of two images taken at an Apollo landing site. They have been offset by about 100 pixels in X and Y direction. Notice there is only the astronauts, the LEM, an US flag, and lunar background, there is no star in the the sky due the the very short expsoure used to take the picture (much like day time).
Reference Image

Offset Image (~ 100px in X & Y)

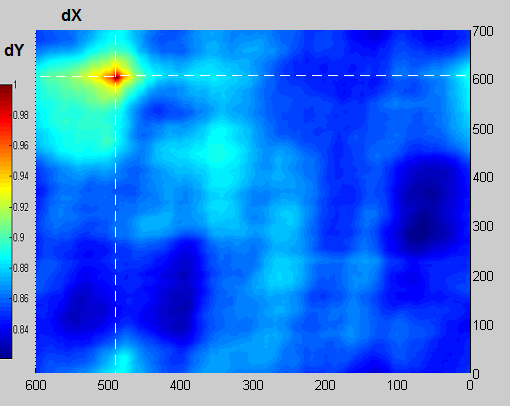
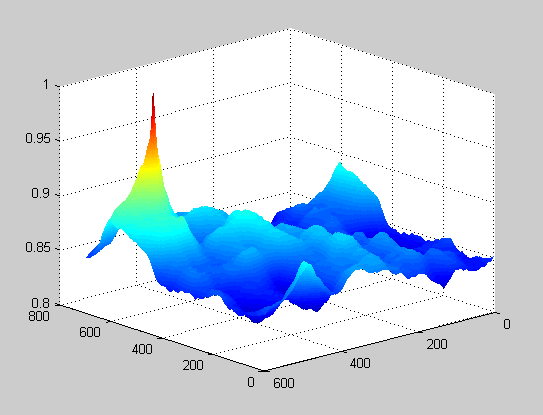
The next two plots show the 2D and 3D DIC function of those two Moon landing images, notice the peak of the correlation function is located at registration values around 100 pixels from the upper left image corner.
DIC 2D, color coded (red peak, blue through)
DIC 3D
Advanced DIC and noise rejection:
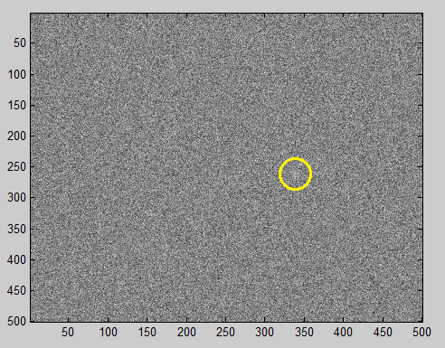
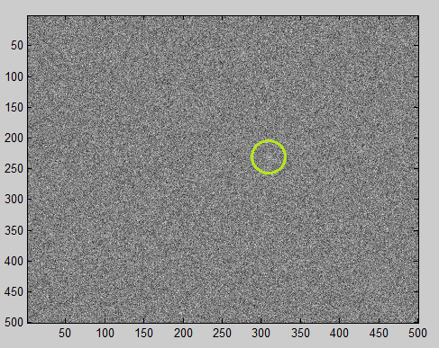
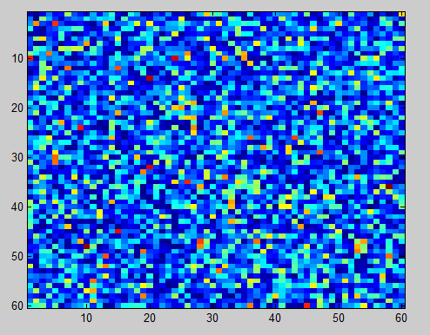
The above Moon landing pictures feature a very rich background (many patterns) as well as a good SNR. However in the context of auto-guiding one usually does not have such a nice situation, but more like few stars (or a diffused pattern) among a sea of noise (black sky background, or more likely sky glow). To illustrate this, below two guider images of a single star offset by 30 pixels in X and Y. Since the SNR is poor (near 0dB) they have been encircled in yellow for the reference frame and in green for the current frame (offset by 30 pixels) for better visibility.
Guide star reference frame
Guide star current frame
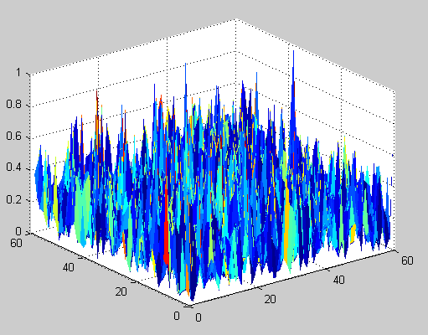
Without any noise reduction technique the DIC hardly exhibits any peak. There are two many pixel of noise versus the few from the dim star. Below the raw 2D and 3D DICs.
Raw DIC 2D (poor SNR)
raw DIC 3D (poor SNR)
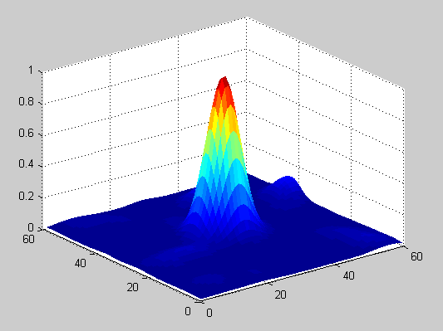
Advanced DIC (ADIC) uses optimal filtering techniques as well as multi-variate statistics for extracting the useful information from the noise floor. Basically each, and every, pixel in the guider frame (or sub-frame if the user have elected to use only a portion of the all guider frame), are weighted and used based to its likelihood level of carrying information, noise pixel are therefore ignored. Below the processed 2D and 3D ADICs using Innovations Foresight proprietary advanced noise reduction and image enhancement resulting from the processing exactly the same two above guider images under poor SNR. Now one can clearly see the image registration peak at 30 pixel (X and Y), as it should be.
Advanced DIC 2D (same guider frames)
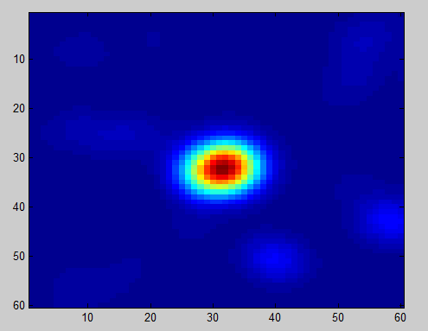
Advanced DIC 3D (same guider frames)
More than one star
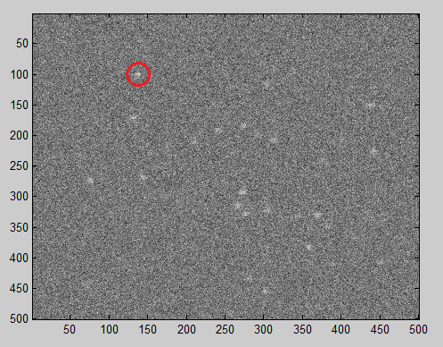
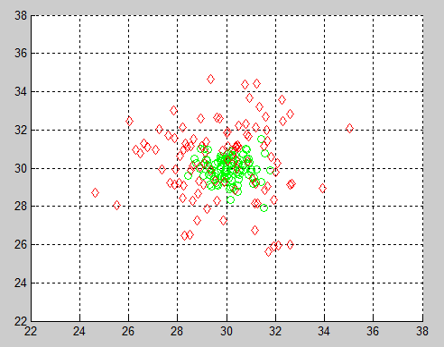
In many occasions when using an ONAG with a large guider FOV at once, or a guide scope, they’ll be more than one star, or some astronomical structures, in the FOV. This results on more information available leading to a better SNR since this full frame technology is a global processing. Also because the seeing is only correlated across a very narrow FOV, few arc-seconds wide (known as the isoplanatic patch), having some information across the guider FOV decreases its contribution by averaging out its effect, especially for short guider exposures for which it can be a limiting factor. As an example, the next two pictures show the image registration performance for 100 different guider frames having the same 40 stars of various magnitudes (diff. mag. from -4.5 to 0) each. Some stars are too dim to be visible but still there and used by the ADIC algorithm. Each of the 100 frames is unique with its own noise realization and seeing, which is different for each star in the FOV. The guider image, on the left, displays the reference frame. Encircled (in red) the brightest star used as a guide star for comparing the auto-guiding performance between a classical centroid based algorithm, using only this star, and the full frame approach, using all the stars (the whole frame). The plot on the right shows the scatter plot of the registration errors (100) found by both, the traditional centroid based approach (red diamond) using the guide star, and the full frame technique (green circle). The actual image offset is 30 pixels X and Y. One can seen that the full frame algorithm achieves a much tighter cluster with about a fourth of the centroid cluster standard deviation. With an ONAG guiding in NIR this will be even more pronounced under seeing limited situations and short guider exposure times.
40 stars under seeing limited conditionEncircled in red the guide starfor centroid auto-guiding
Centroid versus ADIC scatter plot - Axes in pixel (100 frames)
Enjoy real time auto-focus with an ONAG
The ONAG offers the unique opportunity to keep your image sharp while the imager’s shutter is wide opened, by doing real time auto-focus. Our patented “sharpLock” technology, already available with “FocusLock” (FL) software based on a single guide star, is also available with a full guider frame global processing. With SkySurveyor Suite (SkyGuard and SkySurveyor) the user can use the whole guider frame for real time auto-focus when using an ONAG. Our full frame technology is capable of retrieving the necessary information (astigmatism) for the task. Alternatively SKSS allows the selecting of a sub-frame and a single, or few stars, for real time auto-focus too. There is a handy register and stack feature which allows to stack many full (or sub) guider frames before processing them for auto-focus. Since focus shifts imply usually a much slower correction rate than auto-guiding this allows for boosting the SNR and therefore a more accurate auto-focus.
SkySurveyor Suite (SGD and SKS): Full frame Guiding and Focusing (real time)

[/et_pb_text][/et_pb_column][/et_pb_row][/et_pb_section]