Advanced settings
For most setups the default advanced setting values should be kept. Only change those when there is a valid reaso to do so.
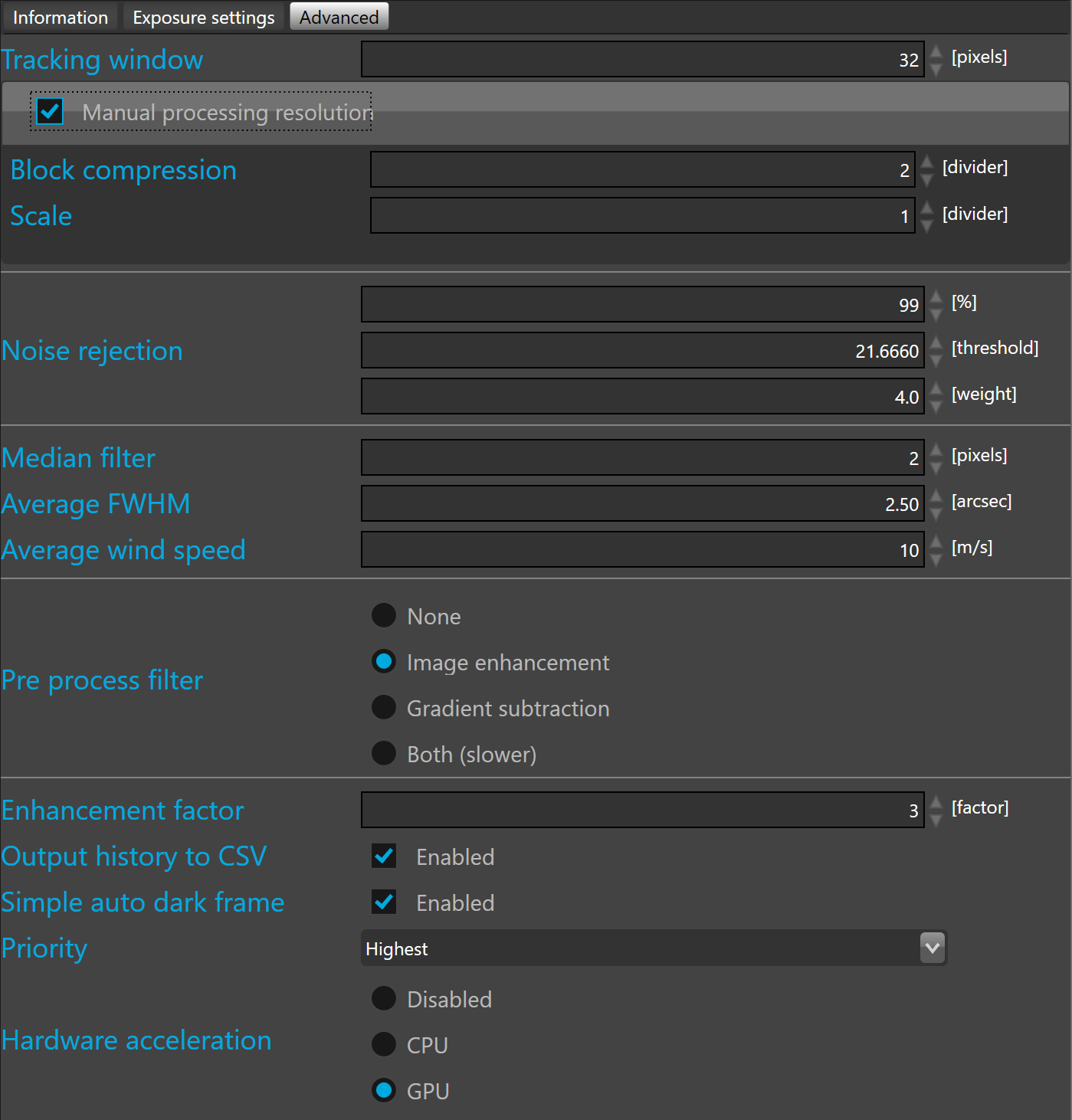
Tracking window is used by the guiding algorithms. It defines the length of the tracking window edge in pixels. This means that the correlation peak is searched inside a squared window of this size. By default, the tracking window size is 32x32 pixels.
 Unlike centroid based auto-guiding software the size of the window can be made as wide as possible if one expect any large image registration values since SkyGuard processed the all guider frame. However a larger window leads to a longer processing time.
Unlike centroid based auto-guiding software the size of the window can be made as wide as possible if one expect any large image registration values since SkyGuard processed the all guider frame. However a larger window leads to a longer processing time.
Manual processing resolution by default the processing resolution is calculated automatically by SkyGuard to provide optimal processing performances.
The block compression and scale parameters can be manually set. To use manual settings instead of automatic settings, just check the manual processing resolution check box.
To process the frame at the full resolution on large chip on 64bit version only. Set the block compression = 1 and scale = 1 and check the manual processing resolution.
Block compression allows to define how the frame will be divided to reduce the amount of memory used and the time required to process it. By default the block compression is not used and set to 1.
Block compression is a trick that allow to fold the frame on itself by lowering its size without losing any information nor pixel resolution.
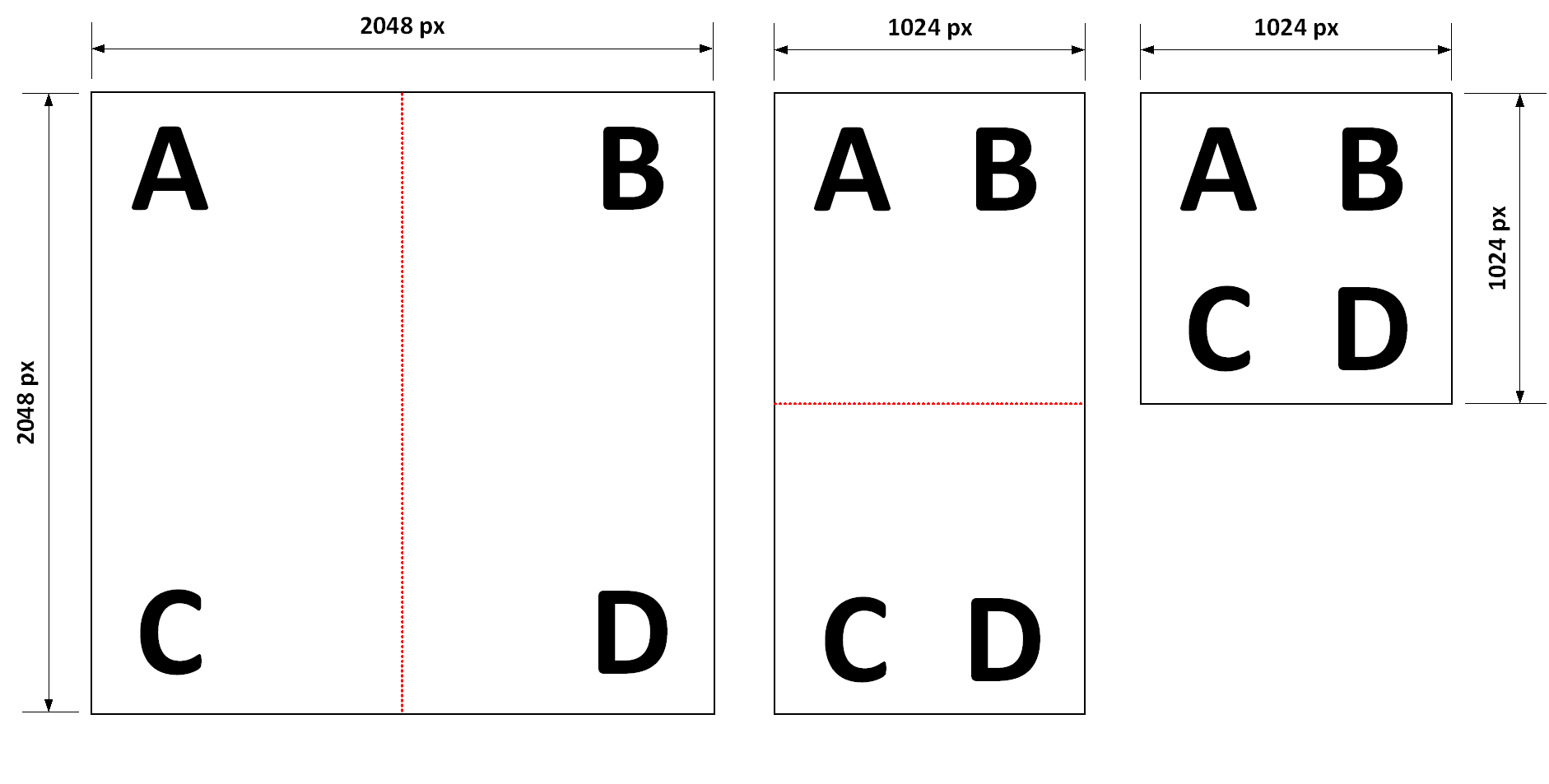
To illustrate how block compression is operating, we took a guider frame of 2048x2048 pixels containing four objects distributed in each corner (A, B, C and D).
With a block compression divider of 2, the guider frame size is divided by 4 leading to eventually a compressed frame resolution of 1024x1024 pixels without loosing any information (objects A, B, C and D are still in the image)
 The valid range of the block compression is between 1 and 6. Block compression has an impact on the SNR, the more the image is compressed the less is the SNR.
The valid range of the block compression is between 1 and 6. Block compression has an impact on the SNR, the more the image is compressed the less is the SNR.
Scale allows to define how the frame will be divided to reduce the amount of memory used and the time required to process it.
Scale works like binning the main difference with the binning is that the guider frame resolution is divided by the scale value only in memory for the processing, the frame captured by the guider camera remain at the resolution corresponding to the current binning value. As scale does not affect the resolution of the guider frame stored in the working folder this option is very useful on camera with large sensor or when using the main camera for guiding.
The maximum scale is calculated from the current binning, average seeing and the performances of the setup. With low focal length < 600mm the maximum scale can not be greater than 1.
 The maximum guider output resolution is limited to 4 megapixels in 32bit version.
The maximum guider output resolution is limited to 4 megapixels in 32bit version.
Noise rejection probability is the probability to consider a pixel as noise versus useful information.
A lower value means that a given pixel is more likely to be consider as carrying signal information and therefore used for auto-guiding.
By default, this parameter is set to 99% if the SNR drops below 20dB to 15dB, this probability can be reduced to avoid signal rejection. The valid range is between 25% and 99%.
Threshold is automatically set by the noise rejection probability, in rare occasion it can be set manually.
Weight is related to a multi-variate metric associated with the threshold value, it can also be set manually but this should be done with care. By default, set to 4
Median filter is a nonlinear digital filter used to pre-process the guider frame.
It is very useful to reject single hot/cold pixels and local artifacts. By default it is set a 2 which should work well for hot pixel removal.
If necessary it can be increased however larger values leads to longer processing time and eventually to the removal of small stars.
We do not recommend to disable the median filter (set at 1).
Average FWHM defines the observatory site local seeing condition as Full Width Half Maximum in arc-seconds.
Average FWHM is used by the image enhancement algorithm and also by the optimal guiding aggressiveness calculator. Local seeing conditions must be evaluated before setting this parameter and it can be adjusted night after night if necessary.
Its value is not super critical.
Average wind speed corresponds to the average wind speed above your observatory in meters per second across the all Earth atmosphere thickness. By default, this parameter is set to 10 m/s.
We recommend to keep this values which is a good time average valid for most night.
If you image from a high altitude site or an exceptional low seeing one you may consider to adjust the average wind speed value.
This parameter is used by the optimal guiding aggressiveness calculator.
Pre-process filter processes the guider frame with image enhancement, gradient subtraction or both. By default the filter is set to image enhancement.
If the guider frame is affected by a large gradient that cannot be completely canceled with the image enhancement or gradient filter. It could be helpful to combine those filters to completely remove the gradient. Generally, we do not recommend to combine the filters because it slow down the performances, we recommend to identify the source of this abnormal gradient instead of trying to cancel it. In case that you cannot solve the gradient, you can use this solution.
Enhancement factor is only applicable with image enhancement filter. It is set at 4 by default. The larger the value the more the image is filtered.
Output history to CSV allows to write statistics about the guider frame into a CSV file. By default it is disabled.
Simple auto dark frame subtracts the dark frame from the guider output (current) frame.
Priority controls the thread priority of the acquisition loop. By default set to highest priority.
 Multi-threading priorities is quite sensitive, generally the best is to keep the default priority but with old CPU, sometimes the priority level can be lowered to avoid CPU overload.
Multi-threading priorities is quite sensitive, generally the best is to keep the default priority but with old CPU, sometimes the priority level can be lowered to avoid CPU overload.
Hardware acceleration allows to reduce the processing time by doing parallel processing.
|
Disabled |
No hardware acceleration. The guider frames are processed sequentially. |
|
CPU |
When the hardware acceleration is done by the CPU, the guider frame is subdivided in equal parts according the number of CPU available on the computer. That means, all parts are processed at the same time. As each parts are smaller than the entire frame by a factor equal to the number of CPU available on the computer, the total time required to process all parts is smaller than the time required to process the entire frame in a sequential process. |
|
GPU |
The hardware acceleration is delegated to GPU. Like the CPU, the GPU is able to process several parts of the entire frame at the same time but the GPU contains much more core than the CPU then it can achieve more parallel processing than the CPU. GPU allows to achieve massive parallel processing.
|

|
If the GPU is not available, the GPU indicator is displayed on a dark gray background |
|
|
If the GPU is being initialized, the GPU indicator is displayed on an orange background |
|
|
When the GPU is ready to use, the GPU indicator is displayed on a green background |
|



The GPU hardware acceleration become effective only the the GPU indicator is displayed on a green background.
If the GPU is not ready and the hardware acceleration is set to GPU, the CPU hardware acceleration is used instead and it will automatically switch to GPU when it will be ready.